机械臂电气接口
1 Introduction
1.1 Pedestal
A. 底座正面接口如图 2.1.4.2-1 所示:

图 2.1.4.2-1 F底座正面接口
- ① 功能接口组一
- ② 功能接口组二
- ③ 功能接口组三
- ④ 功能接口组四
B. 底座上面接口如图 2.1.4.2-2 所示:
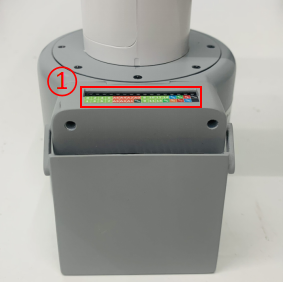
图 2.1.4.2-2 底座上面接口
① 功能接口组五
- C. 底座右侧接口如图 2.1.4.2-3 所示:

图 2.1.4.2-3 底座右侧接口
- ① 电源DC接口
1.2 底座接口说明
注意: 功能接口组均为2.54mm杜邦接口,外部可使用2.54mm杜邦线。
A. 图 2.1.4.2-4, 图 2.1.4.2-5, 图 2.1.4.2-6 和图 2.1.4.2-7 分别为底座正面的四个拓展接口组的信号名,该部分接口用于连接不同的Arduino开发板 功能接口组一与功能接口组四 可用于扩展针脚为Arduino UNO 接口相同开发板,如:Arduino UNO, Arduino MEGA 2560等;
功能接口组二与功能接口组三 可用于扩展针脚为 Arduino MKR WiFi 1010 接口一致开发板;

图 2.1.4.2-4 功能接口组一

图 2.1.4.2-5 功能接口组二

图 2.1.4.2-6 功能接口组三

图 2.1.4.2-7 功能接口组四
B. 图 2.1.4.2-8 为底座上面功能接口组无的信号名,该部分接口与所连接的Arduino开发板的各个功能接口一一对应。

图 2.1.4.2-8 功能接口组无
C. 电源DC接口:使用DC电源插座,外径6.5mm,内径2.0mm;可使用厂家配备的8.4V 5A DC电源适配器给mycobot 280进行供电。
2 机械臂末端电气接口
2.1 机械臂末端介绍
A. 机械臂末端如图 2.1.4.2-9 和图 2.1.4.2-10 所示:

图 2.1.4.2-9 机械臂末端
- ① 舵机接口
- ② Atom

图 2.1.4.2-10 机械臂末端
- ① 功能接口组六
- ② Grove
- ③ Type C
2.2 末端接口说明
- A. 功能接口组六各个接口的定义如表 2.1.4.2-1 所示:
| 标签 | 信号名 | 类型 | 功能 | 备注 |
|---|---|---|---|---|
| 5V | 5V | P | DC 5V | |
| GND | GND | P | GND | |
| 3V3 | 3V3 | P | DC 3.3V | |
| G22 | G22 | I/O | GPIO22 | |
| G19 | G19 | I/O | GPIO19 | |
| G23 | G23 | I/O | GPIO23 | |
| G33 | G33 | I/O | GPIO33 |
注意:
I: 仅作为输入。
I/O: 该功能信号包含输入和输出组合。
当管角设置为输出端时,它将输出电压3.3V。
1、单个管角的拉电流随管脚数量增加而减小,从约40mA减小到29mA。
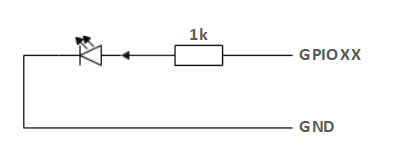
如果某个GPIO被设置为输出模式时,输出高电平信号,电路连接如图 2.1.4.2-11 所示,LED灯将点亮。
图 2.1.4.2-11
B. Type C接口:可用于和PC端连接通讯,更新固件使用。
C. Grove : 定义如图 2.1.4.2-12 所示
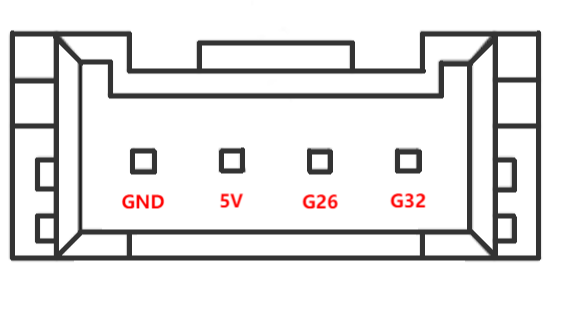
图 2.1.4.2-12 Grove
D. 舵机接口:用于末端拓展夹爪时使用,当前支持配套的自适应夹爪使用。
E. Atom:用于 5X5 RGB LED(G27)显示和按键功能(G39)